Algorithme de désaturation
Publié en 2025. English version
Ce document décrit l’algorithme de décompression implémenté dans cet outil, qui est basé sur le modèle Bühlmann ZHL-16C avec Facteurs de Gradient (GF). L’algorithme simule l’absorption et la libération de gaz inerte (Azote) dans 16 compartiments tissulaires théoriques pendant une plongée et calcule un profil de décompression sûr.
Concepts
- Modèle Bühlmann ZHL-16C: Ce modèle utilise 16 compartiments tissulaires (types de tissus), chacun caractérisé par une demi-vie (t12), et des coefficients ‘A’ et ‘B’. Ces paramètres définissent la vitesse à laquelle un compartiment absorbe et libère le gaz inerte, ainsi que sa tension maximale admissible de gaz inerte (valeur M) à une pression ambiante donnée.
- Pression Partielle d’Azote (PN2): La quantité d’azote dans le gaz respiré (air, 79% N2) à une profondeur donnée.
- Tension Tissulaire: La pression partielle d’azote au sein d’un compartiment tissulaire.
- Valeurs M: La tension maximale admissible de gaz inerte dans un compartiment tissulaire à une pression ambiante donnée.
- Facteurs de Gradient (GF): Un facteur de sécurité appliqué aux valeurs M.
GF_lowest appliqué à la profondeur maximale, etGF_highà la surface. Nous pouvons interpoler linéairement le GF entre ces deux valeurs en fonction de la profondeur actuelle. - Valeurs M Modifiées: Les valeurs M ajustées par les Facteurs de Gradient, créant ainsi un “couloir” dans lequel la tension tissulaire doit rester.
2. Calcul du Profil de Plongée
a. Initialisation
Les 16 compartiments commencent avec des tensions égales à la PN2 de surface (0,79 bar). bottomTime, maxDepth, GF_low et GF_high sont pris en entrée.
b. Phase de Descente
- Le plongeur descend de la surface à
maxDepthà uneDESCENT_RATEconstante. - Pendant la descente, les tensions des compartiments sont continuellement mises à jour chaque minute (
TIME_STEP).
c. Phase de Fond
- Après avoir atteint
maxDepth, le plongeur reste à cette profondeur pendant lebottomTime(moins le temps de descente). - Les tensions des compartiments continuent de se charger (augmenter) en fonction de la PN2 à
maxDepth.
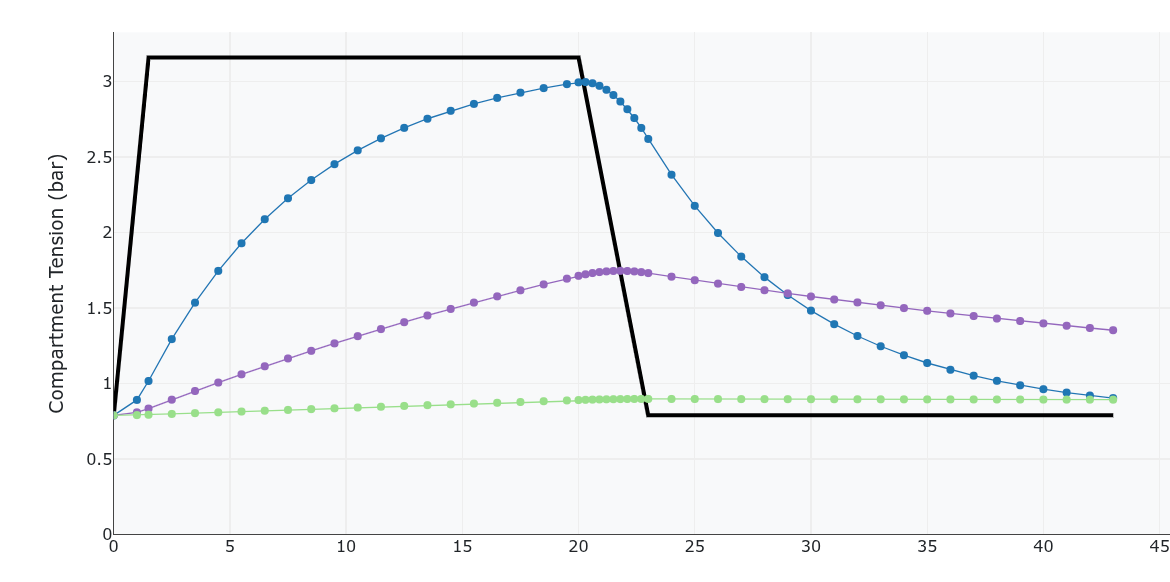
Sur ce graphique, nous voyons les tensions de 3 compartiments (le plus rapide, le plus lent et un intermédiaire) augmenter pendant la descente et le temps de fond, puis diminuer après la remontée à la surface.
d. Phase de Remontée et de Paliers
C’est la partie la plus critique de l’algorithme, où les paliers de décompression sont déterminés. Le plongeur remonte itérativement de maxDepth vers la surface (LAST_STOP_DEPTH, typiquement 3m).
- Déterminer la Prochaine Profondeur Cible: L’algorithme calcule la prochaine profondeur de palier potentielle, typiquement par incréments de
STOP_INTERVAL(par exemple, 3m). - Simuler la Remontée à la Prochaine Profondeur: Il simule d’abord une remontée à cette
nextDepthà laASCENT_RATEet calcule les tensions résultantes (tensions_next). - Vérifier la Sécurité:
isSafeAtDepthest appelée pour vérifier si tous les compartiments seraient dans leursvaleurs M modifiéesà cettenextDepth.- Le
GFutilisé pour la valeur M modifiée est interpolé en fonction de lacurrentDepthet de lamaxDepth. - Si la tension d’un compartiment dépasse sa valeur M modifiée, il est considéré comme dangereux de remonter directement.
- Le
- Palier de Décompression (si dangereux):
- Si dangereux, un palier est initié à la
currentDepth. - Le plongeur reste à
currentDepth, et les tensions sont mises à jour par incréments deTIME_STEP. - L’algorithme vérifie continuellement s’il est sûr de remonter à
nextDepthaprès chaqueTIME_STEP. - Une fois que c’est sûr, le palier se termine, et les détails du palier sont ajoutés au tableau
stops.
- Si dangereux, un palier est initié à la
- Effectuer la Remontée: Le plongeur remonte ensuite à la
nextDepth. - Répéter: Les étapes 1 à 5 sont répétées jusqu’à ce que
currentDepthsoit inférieure ou égale àLAST_STOP_DEPTH.
e. Remontée Finale à la Surface
- Une fois que le plongeur atteint
LAST_STOP_DEPTH, une remontée finale à la surface (0m) est effectuée sans palier. - Les tensions sont mises à jour, et
t_dive_totaletdtrsont incrémentés.
f. Attente en Surface
- Après avoir atteint la surface, la simulation continue pendant
SURFACE_WAIT_MIN(par exemple, 20 minutes).
g. Visualisation
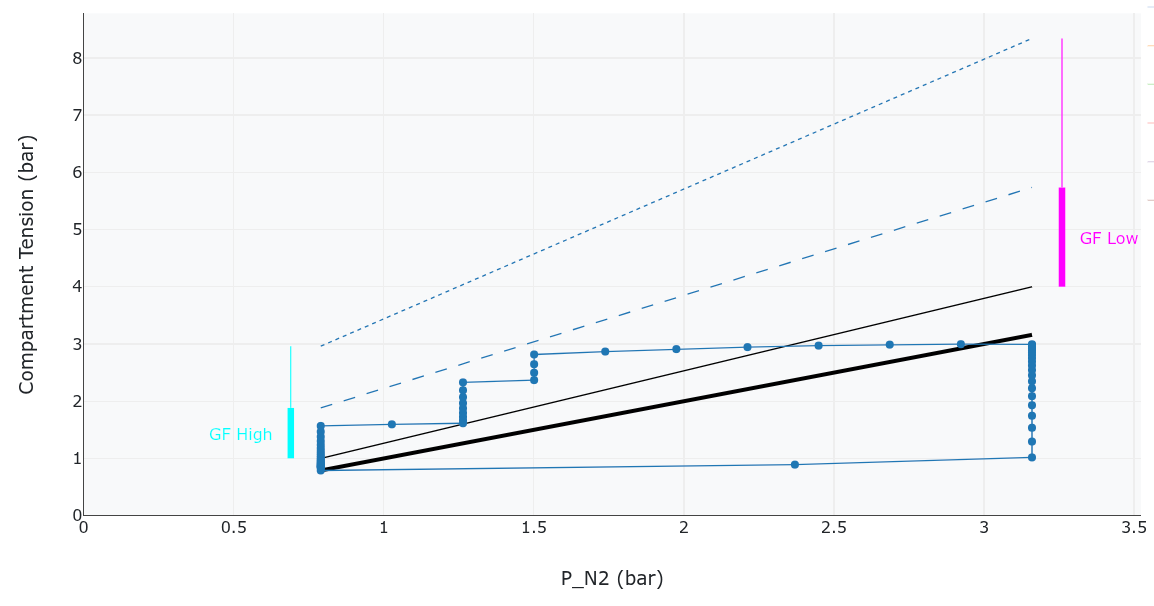
Nous pouvons visualiser le plan de plongée dans l’espace (p_N2, tension). La plongée commence en bas à gauche, se déplace vers le bas à droite pendant la descente. Pendant le temps de fond, la tension