Desaturation algorithm
Published in 2025. French version
This document describes the decompression algorithm implemented in this tool, which is based on the Bühlmann ZHL-16C model with Gradient Factors (GF). The algorithm simulates the absorption and release of inert gas (Nitrogen) in 16 theoretical tissue compartments during a dive and calculates a safe decompression profile.
Concepts
- Bühlmann ZHL-16C Model: This model uses 16 tissue compartments (tissue types), each characterized by a half-time (t½), and ‘A’ and ‘B’ coefficients. These parameters define how quickly a compartment absorbs and releases inert gas, and its maximum allowable inert gas tension (M-value) at a given ambient pressure.
- Partial Pressure of Nitrogen (PN2): The amount of nitrogen in the breathing gas (air, 79% N2) at a given depth.
- Tissue Tension: The partial pressure of nitrogen within a tissue compartment.
- M-Values: The maximum allowable inert gas tension in a tissue compartment at a given ambient pressure.
- Gradient Factors (GF): A safety factor applied to the M-values.
GF_lowis applied at maximum depth, andGF_highat the surface. We can linearly interpolate the GF between these two values based on the current depth. - Modified M-Values: The M-values adjusted by the Gradient Factors, effectively creating a “corridor” within which the tissue tension must remain.
Dive Profile Calculation
a. Initialization
All 16 compartments start with tensions equal to the surface PN2 (0.79 bar). bottomTime, maxDepth, GF_low, and GF_high are taken as input.
b. Descent Phase
- The diver descends from the surface to
maxDepthat a constantDESCENT_RATE. - During descent, compartment tensions are continuously updated every minute (
TIME_STEP).
c. Bottom Phase
- After reaching
maxDepth, the diver remains at this depth for thebottomTime(minus the descent time). - Compartment tensions continue to load (increase) based on the PN2 at
maxDepth.
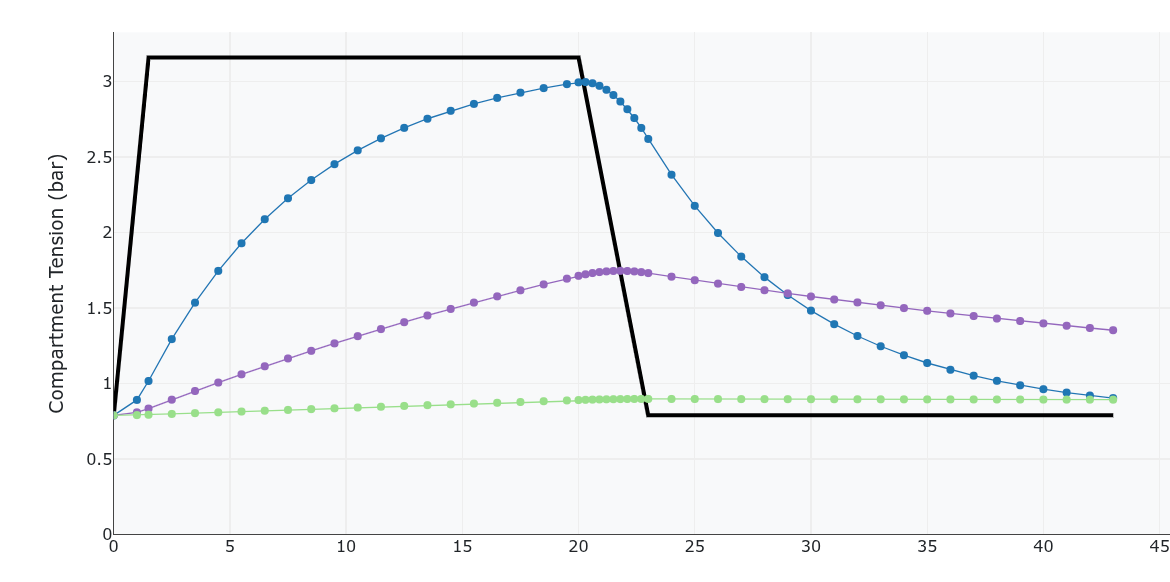
On this plot we see the tensions of 3 compartments (the fastest, the slowest and an intermediate one) raising during descent and bottom time, the decreasing after the ascent to the surface.
d. Ascent and Stops Phase
This is the most critical part of the algorithm, where decompression stops are determined. The diver ascends iteratively from maxDepth towards the surface (LAST_STOP_DEPTH, typically 3m).
- Determine Next Target Depth: The algorithm calculates the next potential stop depth, typically in
STOP_INTERVAL(e.g., 3m) increments. - Simulate Ascent to Next Depth: It first simulates an ascent to this
nextDepthat theASCENT_RATEand calculates the resulting tensions (tensions_next). - Check for Safety:
isSafeAtDepthis called to check if all compartments would be within theirmodified M-Valuesat thisnextDepth.- The
GFused for the modified M-value is interpolated based on thecurrentDepthandmaxDepth. - If any compartment’s tension exceeds its modified M-value, it’s considered unsafe to ascend directly.
- The
- Decompression Stop (if unsafe):
- If unsafe, a stop is initiated at the
currentDepth. - The diver remains at
currentDepth, and tensions are updated inTIME_STEPincrements. - The algorithm continuously re-checks if it’s safe to ascend to
nextDepthafter eachTIME_STEP. - Once it’s safe, the stop ends, and the stop details are added to the
stopsarray.
- If unsafe, a stop is initiated at the
- Perform Ascent: The diver then ascends to the
nextDepth. ` - Repeat: Steps 1-5 are repeated until
currentDepthis less than or equal toLAST_STOP_DEPTH.
e. Final Ascent to Surface
- Once the diver reaches
LAST_STOP_DEPTH, a final ascent to the surface (0m) is performed without any stops. - Tensions are updated, and
t_dive_totalanddtrare incremented.
f. Surface Wait
- After reaching the surface, the simulation continues for
SURFACE_WAIT_MIN(e.g., 20 minutes).
g. Visualisation
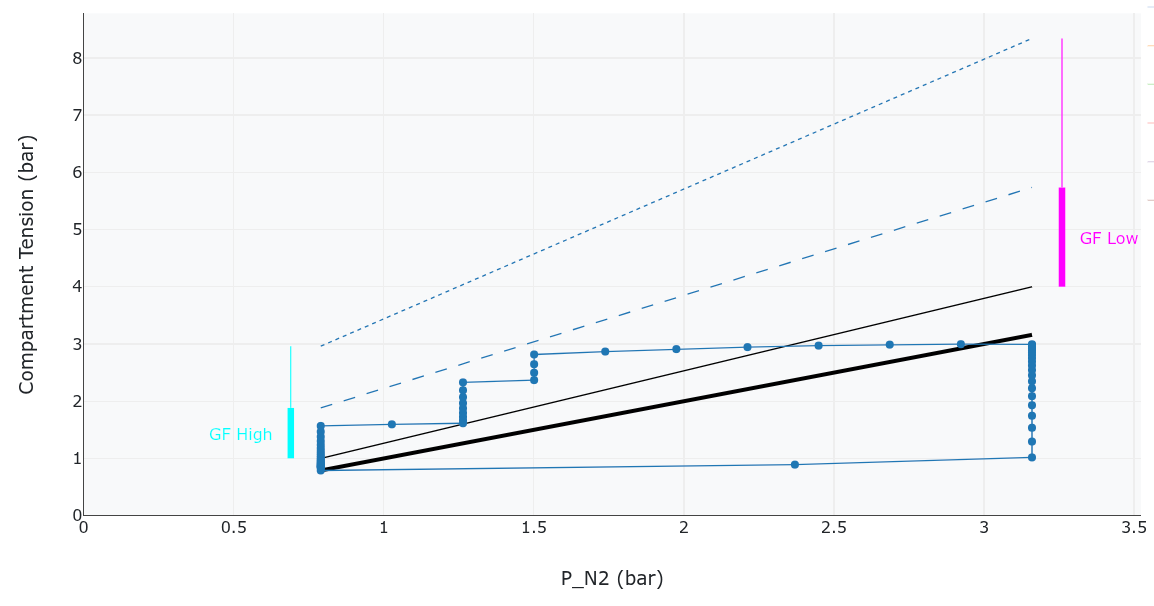
We can see the dive plan in the (p_N2, tension) space. The dive starts in the lower left, goes to the lower right during descent. During bottom time, the tension raises (vertical as the depth is constant). Then we can ascend until we reach the modified M-value (blue dashed lines), so we see a horizontal leftward move. Before hitting the modified M-value we make a stop to decrease tension, and the resume the ascent to reach a second stop in this example.